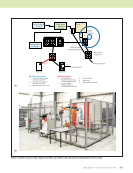
J U L Y 2 0 2 0 • M A T E R I A L S E V A L U A T I O N 865 monitoring station, resulting in false alarms and disrupting productivity. Suitable security for these connected devices needs to be addressed, particularly as condition monitoring with smart sensors becomes more common. Monitoring the accessible surfaces of the storage tank can be carried out through nonintrusive inspection. Components of the digital twin, such as the roof and tank shell, can be updated more frequently. Among standard manual techniques, there are many benefits to utilizing robotics for example, a robotic crawler can scale the tank wall to record a thickness profile without the need for expensive scaffolding (Figure 4). Several vertical profiles can be taken around the tank, with their frequency usually depending on the tank’s diameter. A remote crawler offers enhanced safety through remote inspection and culminates in a graphical digital record. When using a dry- coupled ultrasonic wheel probe (which adds portability), the thickness profile helps to identify any ring corrosion generated at a maintained product level. Such corrosion can be correlated with the number of scans taken around the periphery of the tank, but also note that this will provide a greater probability of detection than traditional manual thickness measurements on a sparse grid separation. The data itself serves as a record and input to the asset’s digital twin. Capturing the inspection results of the various technolo- gies in a digital twin of the tank will, in the future, also enable more advanced forecasting of degradation through prediction modeling in order to determine future capabilities of the storage tank. Case Study 3: Nonintrusive Vessel Testing In addition to the technologies discussed in the section on storage tanks, a virtual representation needs to mimic the condition of an asset to provide a picture of its current state or enough information to perform risk analysis and schedule maintenance. Having as much “good” data as possible about the condition of the asset is paramount in order to facilitate decision making. For example, fit-for-purpose decisions would greatly benefit from knowing the most accurate condition of a vessel wall through mapping, as similarly described for tank shell walls. One of the most discussed trends in the oil industry is the requirement to no longer enter confined spaces. Where until now vessels were often inspected visually by a person entering them, several oil companies have expressed that they will no longer allow this. This means two possibilities: inspect from the exterior or utilize a remote robotic system on the inside. Automated NDT is essential for many industries where main- taining and evaluating the safety of components is crucial. Applying automation can increase not only safety but the overall longevity of an asset with an increase in measurement and positional accuracy, as well as cost benefits through effi- ciency. One key component of Industry 4.0 is the reduction in human errors. One example of applying automation to improve produc- tivity is automated ultrasonic inspection and its impact on inspection quality and consistency on large assets such as pipelines, vessels, and storage tanks (Figure 5). The inspection Figure 4. Nonintrusive tank inspection: (a) remote crawler utilizing dry-coupled UT (b) MFL floor scanning for out-of-service tank. (a) (b)

866 M A T E R I A L S E V A L U A T I O N • J U L Y 2 0 2 0 company can greatly benefit from the automated process, increased probability of detection, and gains in efficiency and inspection speed. The asset owner benefits from a full digital record of the asset’s condition. Automated inspection systems have been around for many years. More recently, systems have evolved to include PAUT, which can significantly decrease the inspection time and improve the quality of reported thicknesses. Through the single crystal process, a scanner would need nearly 10 min to complete an inspection of a 500 mm × 450 mm area at a resolution of 1 mm × 2 mm. By replacing the probe with PAUT, not only is the scan time reduced to less than 2 min, but because of the array, the system can increase the scan width from 450 mm to 510 mm. Overall, the efficiency is increased by a factor of nearly 6, but with the added benefit of enhanced defect representation through PAUT. On the development side, more accurate ultrasonic tech- niques based on the full matrix capture/total focusing method (FMC/TFM) are being developed, which create a more real- istic image of corrosion. Not only can the true corrosion shape be captured, but it can also be exported into a 3D point cloud, which can be used in other applications. Results of these kind of scans have already been used as input for 3D printing (Figure 6). This will enable better characterization of ME TECHNICAL PAPER w digital ndt solutions Figure 5. Nonintrusive inspection of vessel: (a) ultrasonic inspection with magnetic crawler (b) results of a defect recorded with the crawler in the reporting software. (a) (b) Figure 6. Defect data used for 3D printing: (a) physical defect and (b) corresponding 3D-printed defect from the map created via ultrasonic inspection. (a) (b)
ASNT grants non-exclusive, non-transferable license of this material to . All rights reserved. © ASNT 2026. To report unauthorized use, contact: customersupport@asnt.org